
前十字靭帯損傷のメカニズムについては、多くの報告がなされているところですが、今回は教科書に載っていない視点で独自の分析をしてみたいと思います。
Two-mass modelを用いた仮説
2017年に発表された論文の中で、走行時の床反力に関して下腿の質量と全体の質量を分けて考えるTwo-mass modelというモデルが提唱されました。
今までは、身体全体の質量を一つの剛体として捉えていたものですが、走行中においては下腿には異なる力が働き、分けて考えると床反力を合理的に説明できると考えるものです。
, , A general relationship links gait mechanics and running ground reaction forces.
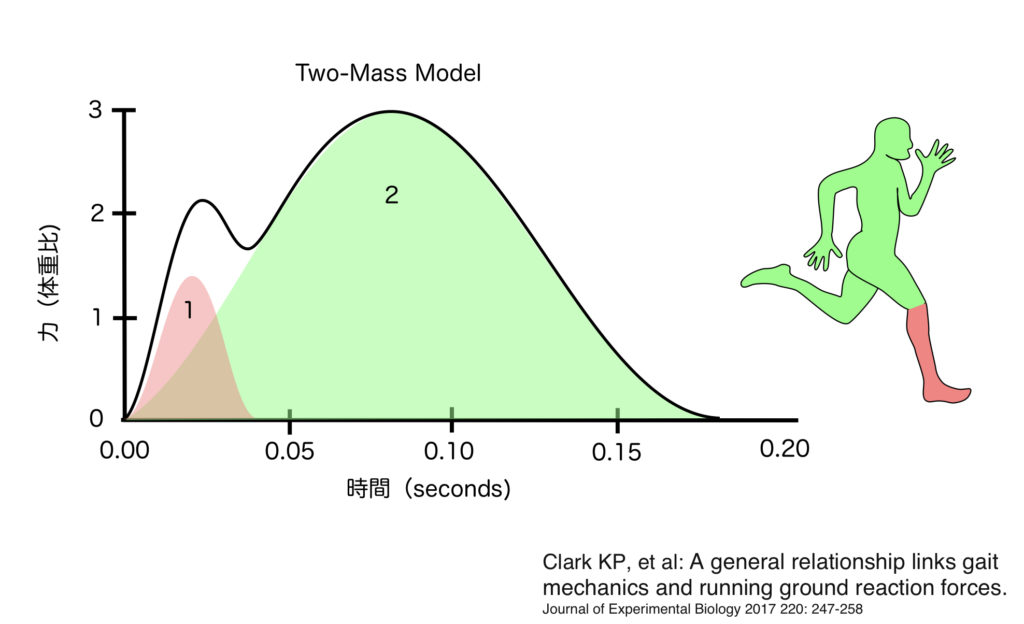
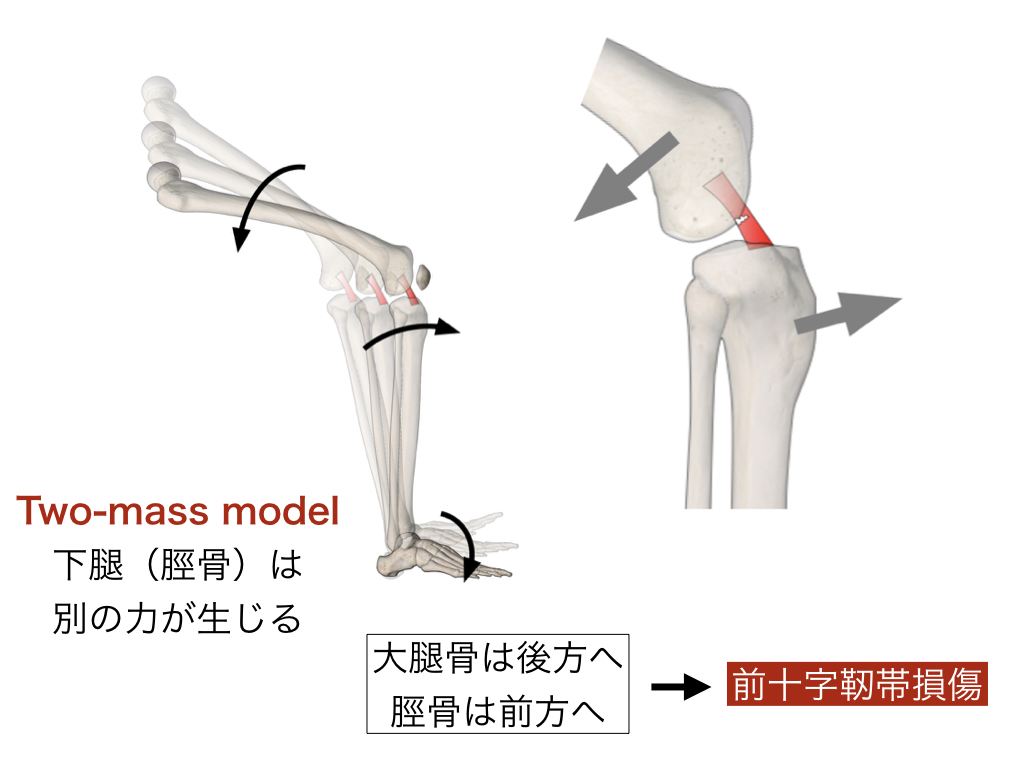
この理論の面白いところは、下腿(脛骨)だけに別の力が働くと捉えられるところです。
カッティング・ストップ動作の2つの制御パターン
カッティングやストップ動作など急激に力の方向を変えて、方向転換を行うときには2つの方略(strategy)が存在します。
①重心コントロールパターン
= 重心の位置によって、床反力を行きたい方向に生み出すことによって姿勢を制御する方法
②筋活動コントロールパターン
= 筋活動によって、重心と床反力を制御して、行きたい方向へ姿勢を制御する方法
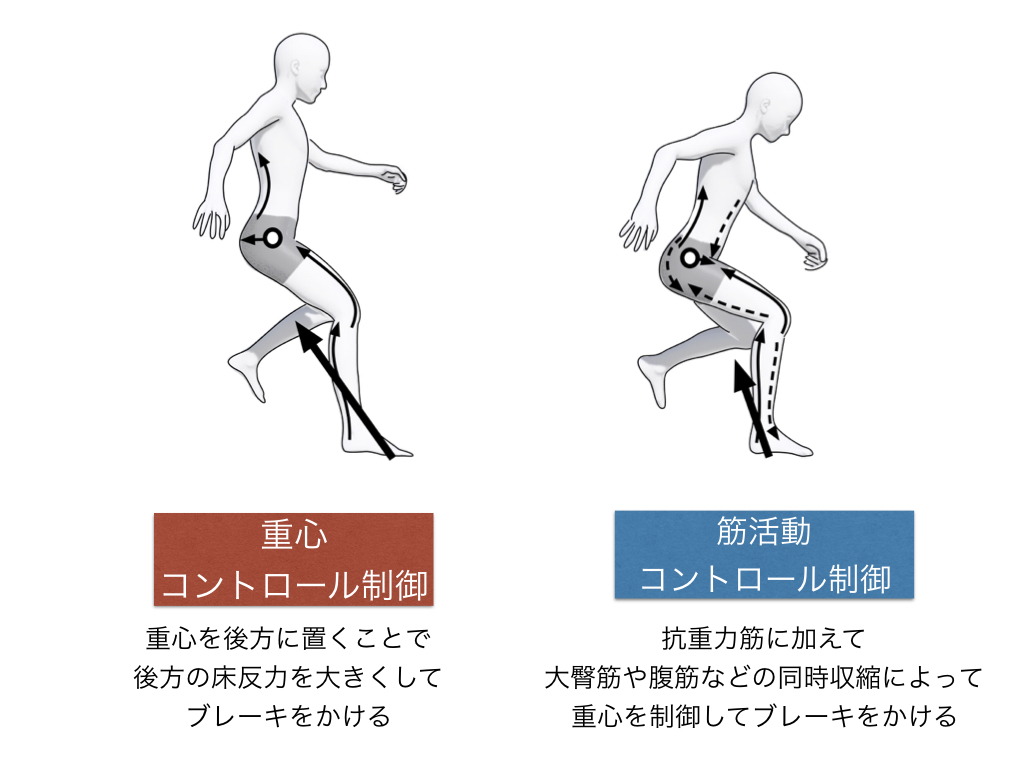
これらの2つのパターンは、使う筋肉が異なります。
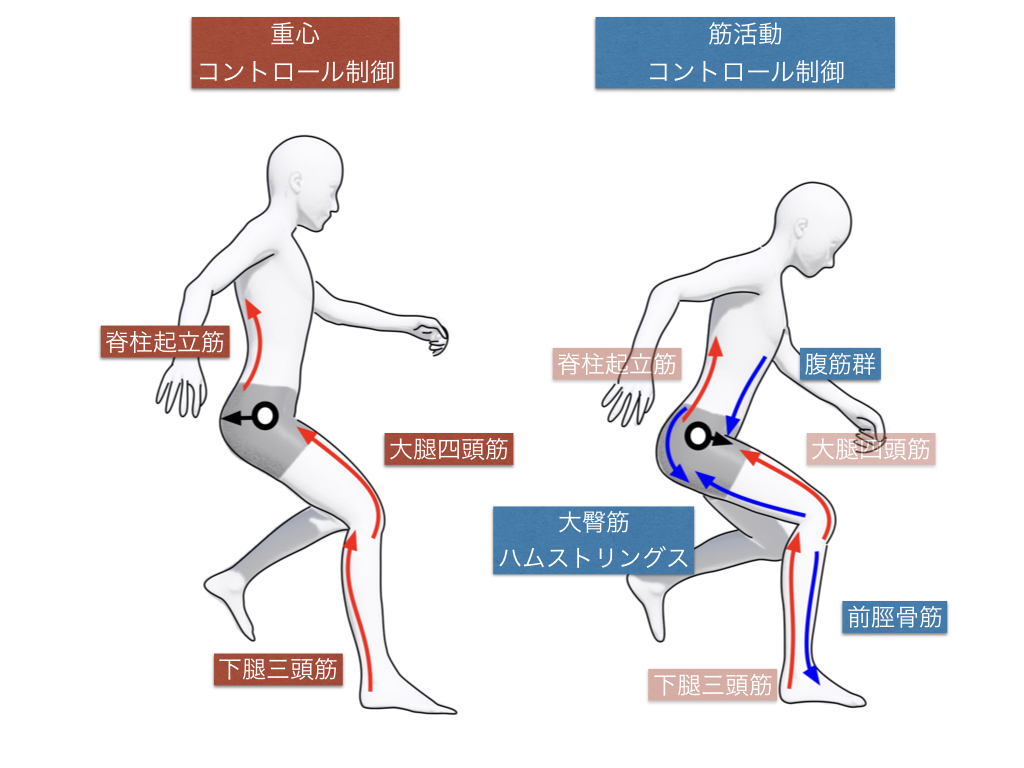
重心コントロール = 抗重力筋が主体
筋活動コントロール = 抗重力筋 + 拮抗筋
重心コントロールのパターンは、重心の力を利用して動きの方向を制御できるので動作が容易になります。また、抗重力筋が中心なので、筋活動にも負担が少ないです。
一方の筋活動コントロールは、抗重力筋と拮抗筋による制御が必要なので、エネルギー消費が激しく、高いスキルが求められます。また、動きの方向に対して重心位置が左右されにくいので、素早い切り替えが可能となります。
Two-mass modelと重心コントロールパターンで前十字靭帯損傷は説明できる
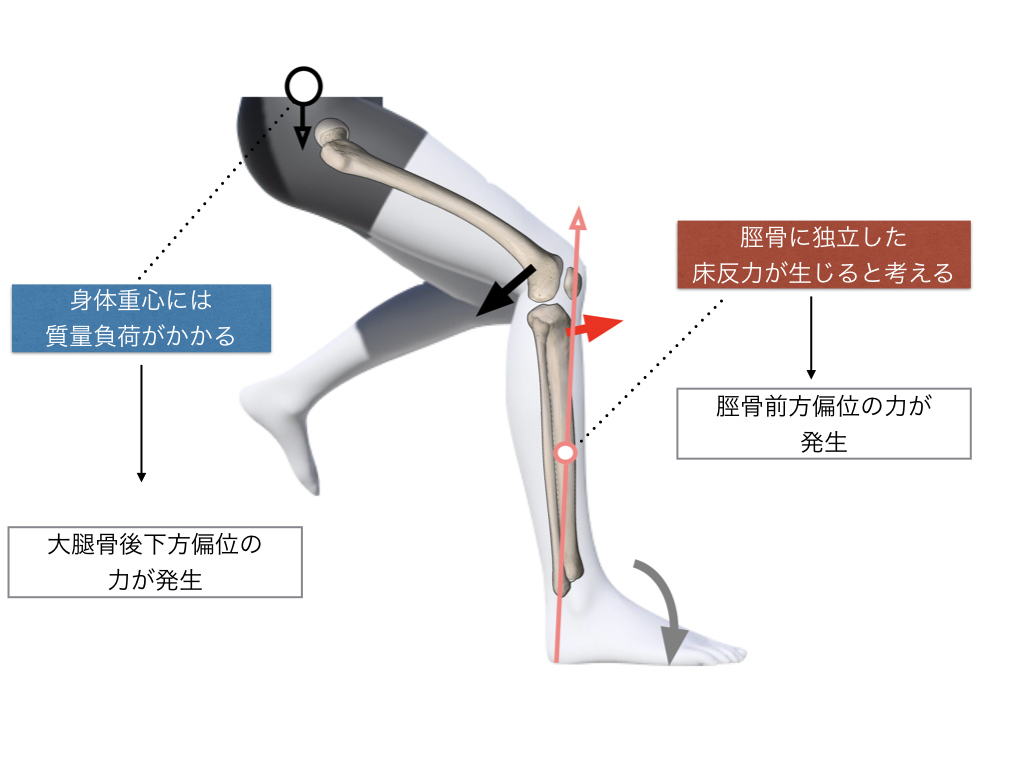
Two-mass modelは急激な動作においては下腿に独立した床反力がかかることを説明しました。
また、重心コントロールパターンでは、抗重力筋が活動の主体であることを説明しました。
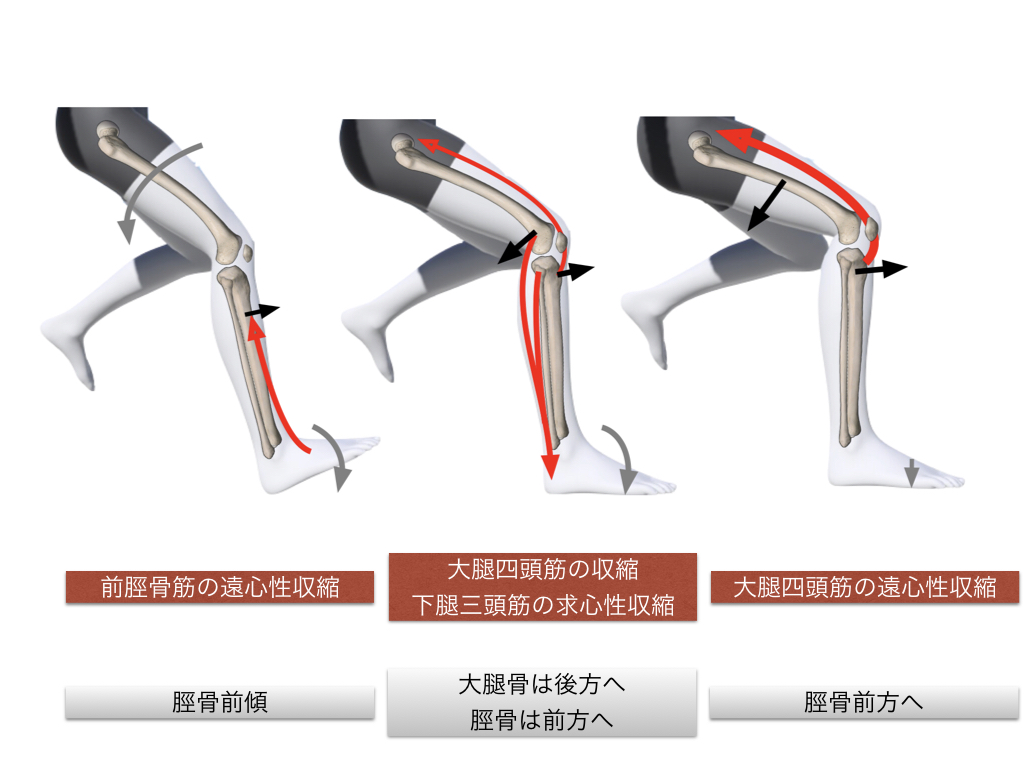
この2つの理論を用いると前十字靭帯損傷のメカニズムを説明可能であると考えられます。
① 踵接地にて、前脛骨筋の遠心性収縮→ 脛骨の前傾
② 下腿三頭筋の収縮と後方重心→大腿骨の後下方移動
③ 大腿四頭筋の遠心性収縮→ 脛骨の前方移動
↓
脛骨の前方移動 + 大腿骨の後下方移動 = 前十字靭帯損傷リスク増
下腿の重心と身体重心を別箇のものとして捉える視点は有益な示唆に富んでいます。
また、抗重力筋と拮抗筋の活動という対比の形で、動作を捉える視点は教科書ではあまり見られないものです。
障害予防の視点から考えると、筋活動コントロールパターンに持っていくことが望ましい方向性です。
筋活動コントロールは、多くの筋活動が必要なので、制御が難しく、疲労や認知の遅れ、動作スピードによって重心コントロールに切り替えてしまうことが障害を誘発している可能性が考えられます。
今回の説明は、これまで言われてきた障害発症要因を上手くまとめられる説明になっているかと思います。
・後方重心
・大腿四頭筋の過剰収縮
・ハムストリングスの筋力低下、活動の遅れ





[…] 前十字靭帯損傷は制御できるか? […]